


Furny utiliza el movimiento como su principal interfaz de comunicación.
Furny de Bruselas Studio ola futura Explore cómo el movimiento sirve como interfaz principal entre los seres humanos y las familias. robot. propuesto durante semana del diseño de milán 2026Tomando la forma de un robot doméstico diseñado como un objeto similar a un mueble, el proyecto investiga cómo la postura, los gestos y la dirección pueden transmitir intención y presencia sin depender de la pantalla o la interacción de voz.
El proyecto se basa en la investigación sobre el diseño de movimientos expresivos en robots no antropomórficos, centrándose en la comunicación no verbal como aspecto fundamental de la interacción humana. En lugar de enfatizar únicamente el desempeño técnico, Furny investiga cómo los comportamientos de movimiento como la inclinación, el posicionamiento y la dirección de la mirada transmiten estados internos y crean una sensación de interacción entre el objeto y el usuario.

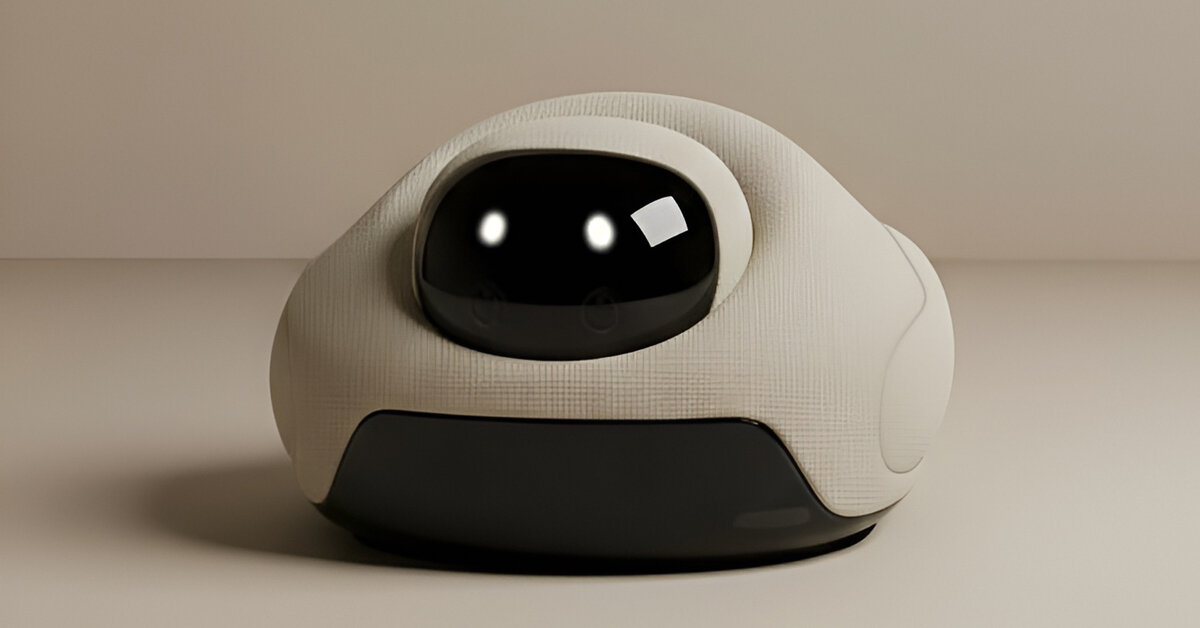
El robot adopta un aspecto sobrio, parecido a un mueble | Todas las imágenes cortesía de ola futura
Futurewave combina el diseño de muebles con la robótica doméstica
estudio Futurewave evitó deliberadamente las características humanoides durante el proceso de diseño. En cambio, Furny adopta una apariencia sobria, similar a un mueble, diseñada para integrarse en el interior de la casa sin dominar visualmente el entorno. Su elemento de cabeza móvil responde a las actividades circundantes controlando los cambios de postura y orientación, señalando la intención a través del movimiento antes de ejecutar una acción.
El proyecto combina diseño industrial, electrónica integrada y sistemas de movimiento controlados por software dentro de un marco de producto fabricable. El movimiento no se ve como una característica adicional sino como el lenguaje de diseño central del objeto. Cada gesto, inclinación y secuencia de movimiento está calibrado para transmitir comportamiento a través de la forma física misma, convirtiendo la superficie y la postura del robot en su interfaz principal.
Al centrarse en el movimiento como comunicación, Ferney propone un enfoque alternativo a la robótica doméstica, en el que la interacción se moldea a través del comportamiento espacial, la presencia física y el movimiento sutil en lugar de pantallas, comandos de voz o imitación antropomórfica.

Furny evita los rasgos humanoides en favor de la abstracción

Los gestos y la orientación reemplazan la pantalla y los comandos de voz

Furny se integra silenciosamente en los espacios interiores contemporáneos

Los cambios sutiles en la postura crean interacción con el usuario.